Week 7:前半学期复习与模拟练习
实验基本信息
- 课程:AI Robotics
- 主题:半学期复习——ROS2 命令、Python 节点、运动学、PID 控制
- 实验工具:ROS2 Humble / Jazzy、turtlesim、Python 3、rclpy
实验内容
本周主要复习前半学期内容,包括 ROS2 基本命令、Python 节点编程、机器人运动学、传感器、RViz 和 PID 控制。通过控制小乌龟走正方形轨迹,综合应用前半学期所学知识。
1. ROS2 常用命令复习
启动 turtlesim 仿真节点:
ros2 run turtlesim turtlesim_node
查看节点:
ros2 node list
查看话题:
ros2 topic list
监听位置信息:
ros2 topic echo /turtle1/pose
发布速度命令:
ros2 topic pub /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 1.0}, angular: {z: 0.0}}"
2. Python 节点练习
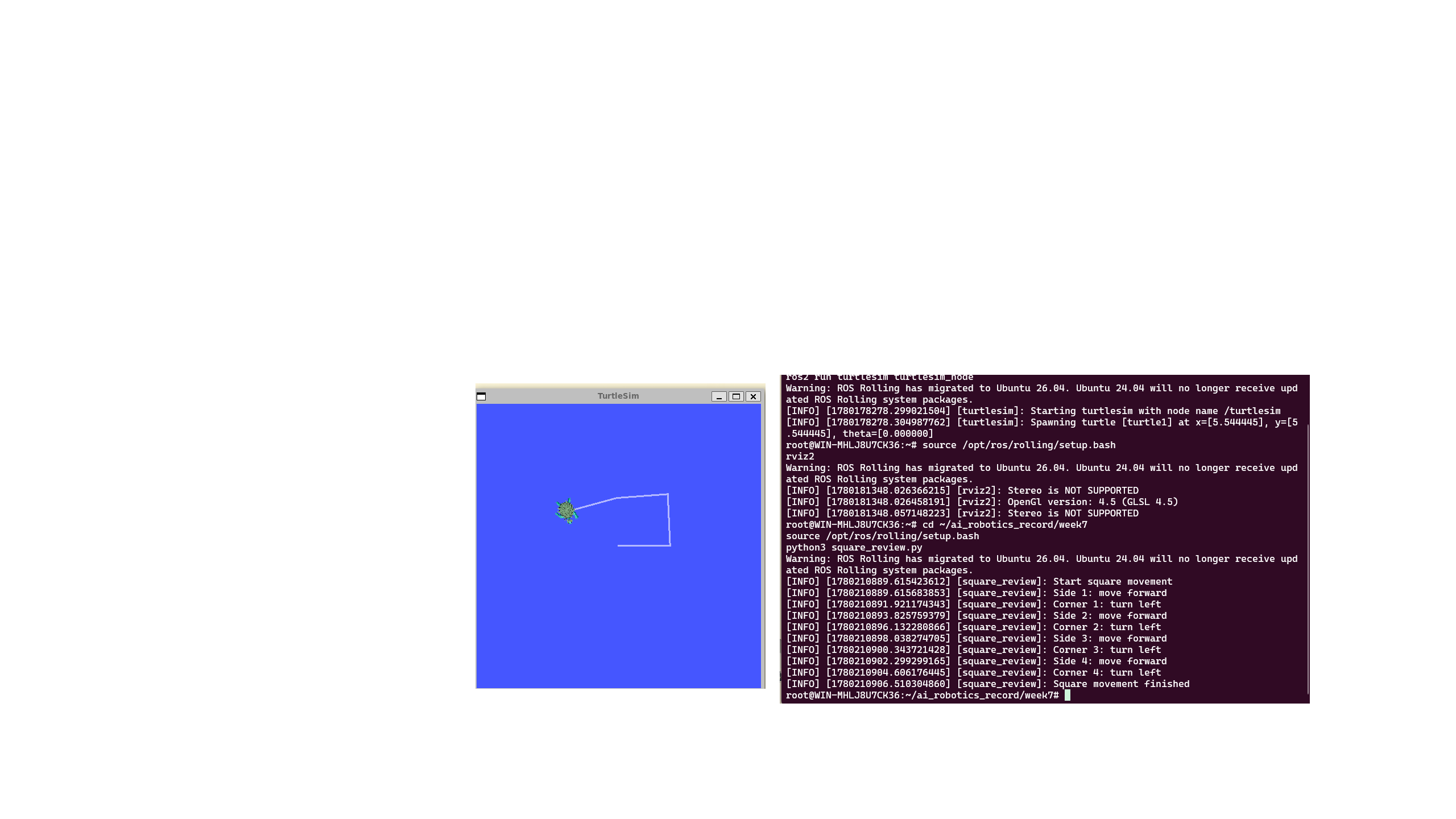
本周练习使用 Python 程序控制小乌龟走正方形。核心思路是利用 rclpy 创建 ROS2 节点,通过发布 cmd_vel 话题控制小乌龟沿正方形轨迹运动。
代码实现 (square_review.py)
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
import time
class SquareReview(Node):
def __init__(self):
super().__init__('square_review')
self.publisher = self.create_publisher(Twist, '/turtle1/cmd_vel', 10)
def move(self, linear_x, angular_z, duration):
msg = Twist()
msg.linear.x = linear_x
msg.angular.z = angular_z
start = time.time()
while time.time() - start < duration:
self.publisher.publish(msg)
time.sleep(0.1)
self.publisher.publish(Twist())
time.sleep(0.3)
def run_square(self):
self.get_logger().info('Start square movement')
for i in range(4):
self.get_logger().info(f'Side {i + 1}: move forward')
self.move(1.0, 0.0, 2.0)
self.get_logger().info(f'Corner {i + 1}: turn left')
self.move(0.0, 1.0, 1.57)
self.get_logger().info('Square movement finished')
def main():
rclpy.init()
node = SquareReview()
time.sleep(1)
node.run_square()
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
运行命令:
python3 square_review.py
程序会让小乌龟沿正方形轨迹行走 4 条边,每走完一条边后左转 90°(约 1.57 弧度)。
3. 运动学计算
已知左轮速度 0.5 m/s,右轮速度 1.5 m/s,轮间距 0.5 m。
线速度计算:
v = (v_left + v_right) / 2
v = (0.5 + 1.5) / 2 = 1.0 m/s
角速度计算:
ω = (v_right - v_left) / L
ω = (1.5 - 0.5) / 0.5 = 2.0 rad/s
这组参数下,机器人以 1.0 m/s 的线速度前进,同时以 2.0 rad/s 的角速度左转。通过调节左右轮速度差可以控制转向方向和幅度。
4. PID 控制复习
| 分量 | 含义 | 作用 |
|---|---|---|
| P(比例) | 根据当前误差调整输出 | 误差越大,修正力越强 |
| I(积分) | 根据历史误差累积进行修正 | 消除稳态误差 |
| D(微分) | 根据误差变化速度调整 | 减少震荡,提高稳定性 |
PID 是机器人运动控制最基础也最重要的算法之一,广泛应用于速度控制、轨迹跟踪等场景。
实验截图
小乌龟正方形轨迹