Week 12:手机摄像头、ArUco 识别与距离估算实验
一、实验基本信息
- 课程:AI Robotics
- 主题:手机摄像头输入、ArUco 标记识别、距离估算
- 实验工具:Python 3、OpenCV、ArUco
二、实验目标
本周实验主要围绕机器人视觉展开,目标是理解机器人如何通过摄像头识别视觉标记(ArUco),并进一步估算目标与摄像头之间的距离。
本次实验完成内容:
- 使用 OpenCV 生成 ArUco 标记
- 使用
DICT_4X4_50字典识别 ArUco - 成功识别课堂要求的 ArUco ID 6
- 根据标记像素宽度估算距离
- 保存识别结果图和距离估算图
三、实验原理
1. ArUco 标记
ArUco 是一种常用于机器人视觉定位的黑白方形标记。每个标记都有唯一 ID,机器人可以通过摄像头识别 ID 和角点位置,用于定位、导航和增强现实等场景。
在本实验中,我使用的标记参数:
- 字典:
DICT_4X4_50 - 标记 ID:
6 - 标记实际尺寸:5 cm × 5 cm
2. ArUco 识别流程
ArUco 识别过程主要包括以下步骤:
- 输入图像 — 从摄像头或文件读取图像
- 转换为灰度图 — 降低计算复杂度
- 检测候选方形区域 — 查找图像中的四边形候选区
- 解码 ArUco ID — 通过字典匹配确认标记 ID
- 绘制检测框和 ID 信息 — 在原始图像上标注识别结果
3. 距离估算方法
当已知 ArUco 标记的实际宽度时,可以通过图像中的像素宽度估算距离。
基本公式:
距离 = 实际宽度 × 焦距 / 图像中的像素宽度
其中:
实际宽度:ArUco 标记的真实尺寸(本实验为 0.05 m)焦距:摄像头像素焦距(本实验设为 700 px)像素宽度:图像中标记的像素宽度(由角点坐标计算)
四、代码实现 (aruco_generate_detect.py)
import cv2
import numpy as np
import math
import os
os.makedirs("img", exist_ok=True)
print("Week 12:ArUco ID 6 生成、识别与距离估算")
print("----------------------------------------")
# 使用课堂常见的 4x4 字典
aruco = cv2.aruco
dictionary = aruco.getPredefinedDictionary(aruco.DICT_4X4_50)
# 生成 ID 6 的 ArUco 标记
marker_id = 6
marker_size = 300
if hasattr(aruco, "generateImageMarker"):
marker_img = aruco.generateImageMarker(dictionary, marker_id, marker_size)
else:
marker_img = aruco.drawMarker(dictionary, marker_id, marker_size)
# 放到白色画布上,方便检测
canvas = np.ones((500, 600), dtype=np.uint8) * 255
canvas[100:400, 150:450] = marker_img
# 转成彩色图用于绘制结果
color_img = cv2.cvtColor(canvas, cv2.COLOR_GRAY2BGR)
# 兼容不同 OpenCV 版本的检测写法
if hasattr(aruco, "ArucoDetector"):
parameters = aruco.DetectorParameters()
detector = aruco.ArucoDetector(dictionary, parameters)
corners, ids, rejected = detector.detectMarkers(canvas)
else:
parameters = aruco.DetectorParameters_create()
corners, ids, rejected = aruco.detectMarkers(
canvas, dictionary, parameters=parameters
)
detected_img = color_img.copy()
if ids is not None:
aruco.drawDetectedMarkers(detected_img, corners, ids)
for i, detected_id in enumerate(ids.flatten()):
pts = corners[i][0]
# 计算图像中标记的像素宽度
edge1 = np.linalg.norm(pts[0] - pts[1])
edge2 = np.linalg.norm(pts[2] - pts[3])
pixel_width = (edge1 + edge2) / 2
# 简单距离估算:距离 = 实际宽度 × 焦距 / 像素宽度
real_marker_size_m = 0.05
focal_length_px = 700
distance_m = real_marker_size_m * focal_length_px / pixel_width
cv2.putText(
detected_img,
f"ID: {detected_id}",
(30, 40),
cv2.FONT_HERSHEY_SIMPLEX,
1,
(0, 0, 255),
2
)
cv2.putText(
detected_img,
f"Distance: {distance_m:.2f} m",
(30, 85),
cv2.FONT_HERSHEY_SIMPLEX,
1,
(0, 128, 0),
2
)
print(f"识别成功:ArUco ID = {detected_id}")
print(f"像素宽度:{pixel_width:.2f} px")
print(f"估算距离:{distance_m:.2f} m")
else:
print("未识别到 ArUco 标记")
# 保存结果图
cv2.imwrite("img/aruco_detect.png", detected_img)
cv2.imwrite("img/distance_demo.png", detected_img)
print("----------------------------------------")
print("已生成:img/aruco_detect.png")
print("已生成:img/distance_demo.png")
print("程序结束")
运行命令:
python3 aruco_generate_detect.py
五、实验结果与分析
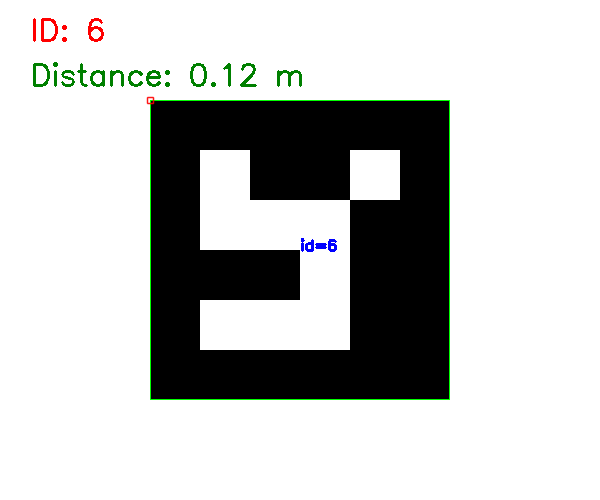
程序成功生成了 ArUco ID 6 标记并进行了识别和距离估算。识别结果在图像上标注了标记 ID 和估算距离,验证了 ArUco 标记作为机器人视觉定位手段的可行性。
距离估算的精度受以下因素影响:
- 标记实际尺寸的测量精度
- 摄像头焦距的标定精度
- 图像中角点检测的精度
六、实验截图
1. ArUco ID 6 识别结果
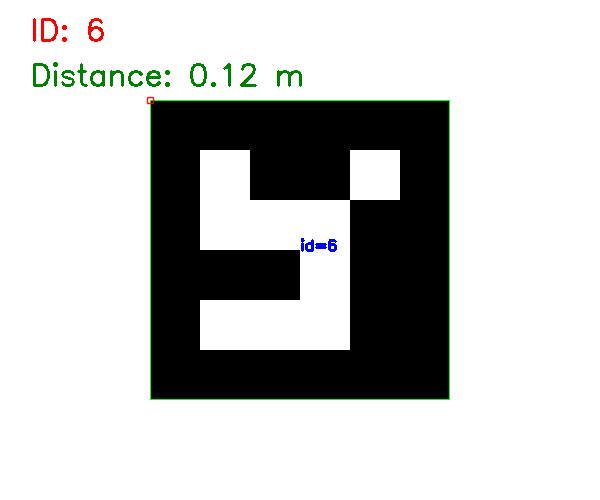
2. 距离估算结果