Week 02 — Ubuntu 与 ROS2 环境搭建
实验目标
搭建 Ubuntu 与 ROS2 基础环境,并通过 turtlesim 验证安装是否成功。
目录结构
Week02/ |-- README.md # 周实验报告 |-- images/ # 环境搭建截图
实验环境
- Ubuntu 24.04 LTS
- ROS2 Jazzy / Humble
- 终端
- VS Code
实验流程
- 准备 Ubuntu 与 ROS2 软件包。
- 加载 ROS2 环境配置脚本。
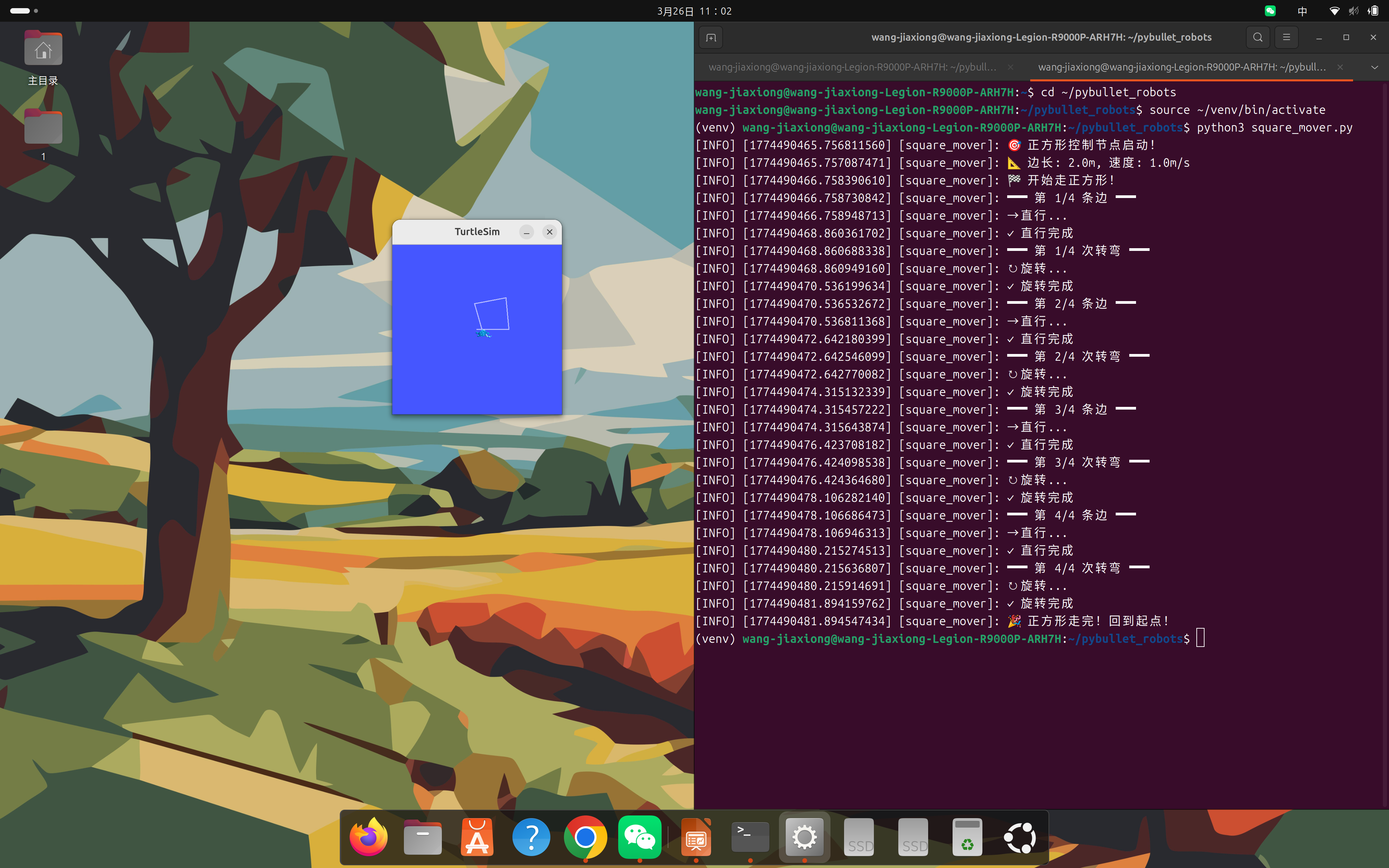
- 启动 turtlesim 验证环境是否就绪。
命令
source /opt/ros/jazzy/setup.bash
ros2 run turtlesim turtlesim_node
实验证据
总结与反思
稳定的 ROS2 环境是后续所有机器人实验的首要前提。