Week 03 — ROS2 话题通信
实验目标
通过 ROS2 话题发布控制 turtlesim,展示 Twist 消息如何影响小乌龟的运动。
目录结构
Week03/ |-- README.md # 周实验报告 |-- images/ # 运动截图
实验环境
- ROS2
- turtlesim
- geometry_msgs/msg/Twist
实验流程
- 启动 turtlesim。
- 发布速度指令。
- 记录运动结果。
命令
ros2 topic pub /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0}, angular: {z: 1.8}}"
实验证据
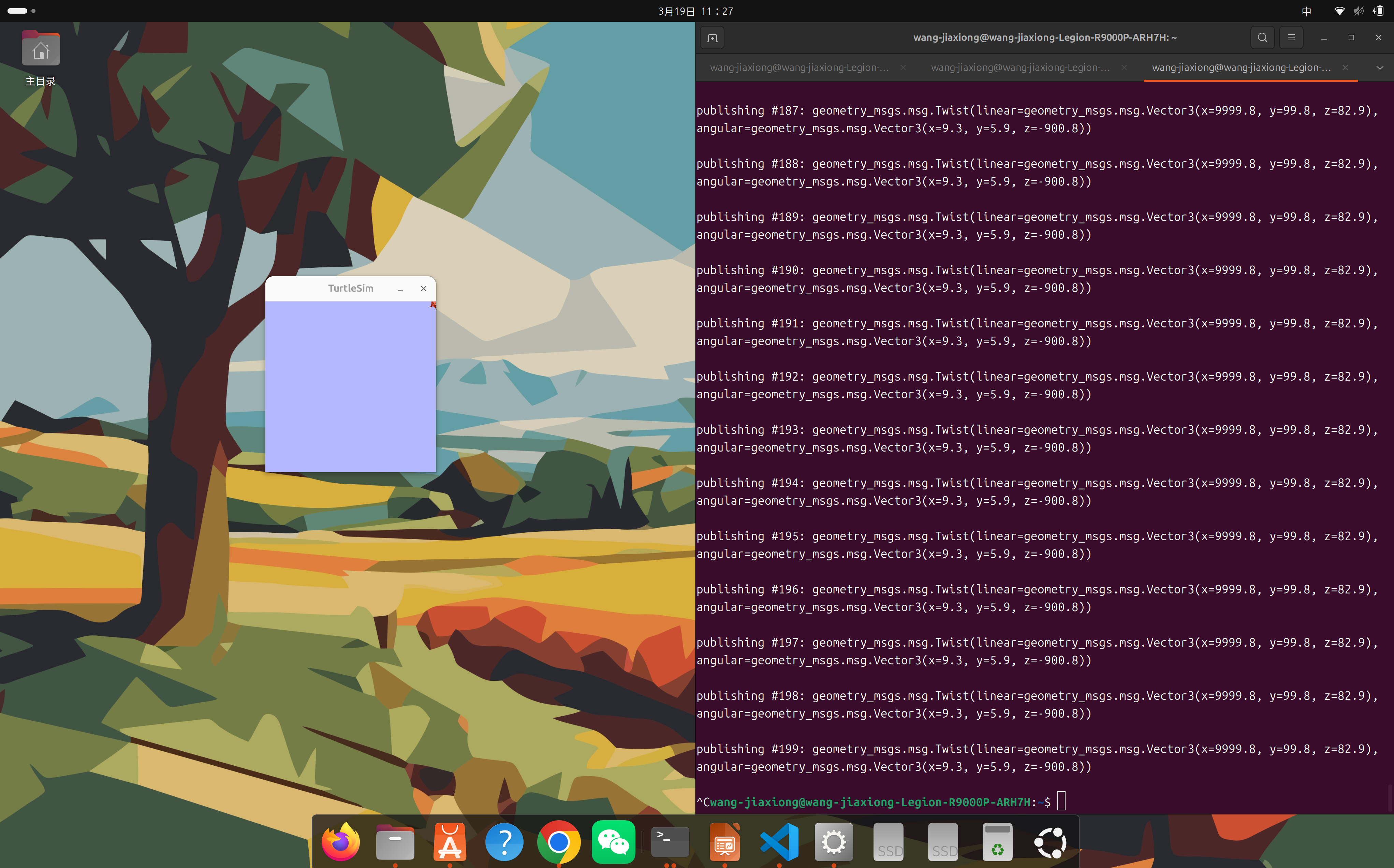
总结与反思
话题发布是测试机器人指令流的一种简单而强大的方式。